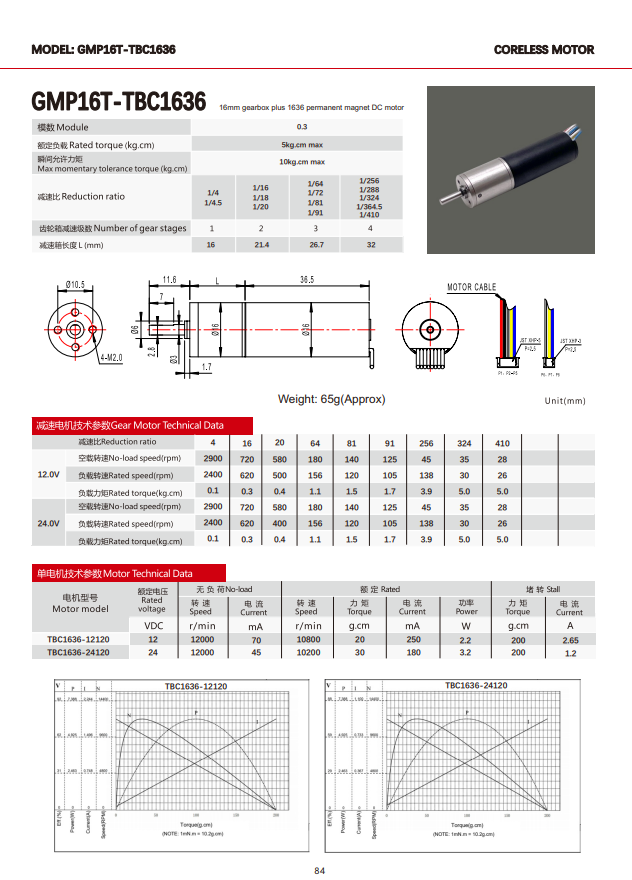
Бесщеточный двигатель постоянного тока GMP16T-TBC1636 300 мНм 12 В 24 В 16 мм для медицинских приборов. Замена двигателя Faulhaber Maxon.





1. Высокая эффективность и энергосбережение, коэффициент преобразования энергии превышает 90%.
Применение конструкции с полой чашкой без сердечника позволяет полностью исключить вихревые токи и потери на гистерезис, а эффективность преобразования энергии может достигать более 90%, что значительно снижает энергопотребление и подходит для медицинского оборудования, требующего длительной работы.
Бесщеточная технология дополнительно снижает трение и потери мощности щеток, повышает общую энергоэффективность, поддерживает широкий диапазон входного напряжения 12 В/24 В, адаптируется к литиевым батареям или источникам питания со стабилизированным напряжением и гибко реагирует на различные сценарии энергопотребления.
2. Высокая динамическая характеристика и точное управление.
Инерция ротора чрезвычайно мала (момент инерции вращения составляет всего 1/3 от инерции традиционных двигателей), механическая постоянная времени составляет всего 10 миллисекунд, обеспечивает мгновенный запуск и остановку, а также изменение нагрузки и отвечает требованиям к точности перемещения медицинского оборудования (например, суставов хирургических роботов, микроинъекционных насосов).
Благодаря сочетанию с технологией электронной коммутации, он поддерживает ШИМ-регулирование скорости и управление с обратной связью, обладает превосходными линейными характеристиками регулирования скорости, а колебания крутящего момента составляют менее 2%, что делает его подходящим для высокоточной регулировки потока или управления положением.
3. Сверхнизкий уровень шума и вибрации.
Отсутствие трения между щетками и коммутатором, чрезвычайно низкий уровень электромагнитных помех (ЭМП) и уровень рабочего шума <40 дБ, что делает его подходящим для медицинских учреждений (например, мониторов, аппаратов для лечения апноэ во сне) и домашних условий (например, массажеров, электрических зубных щеток) со строгими требованиями к бесшумности.
4. Компактная и легкая конструкция
Сверхмалый диаметр 16 мм, малый вес, высокая удельная мощность, экономия места в оборудовании, особенно подходит для портативных медицинских инструментов (таких как ручные ультразвуковые датчики) или модулей управления микророботами.
5. Долгий срок службы и высокая надежность.
Бесщеточная конструкция исключает износ щеток, а благодаря износостойким подшипникам и металлическим редукторам срок службы может достигать десятков тысяч часов, что соответствует высоким требованиям к стабильности медицинского оборудования. Некоторые модели поддерживают уровень защиты IP44, обеспечивая пыле- и водонепроницаемость, что делает их подходящими для использования во влажных или пыльных условиях.
1. Высокий крутящий момент и широкий диапазон скоростей.
Номинальный крутящий момент составляет 300 мНм, пиковый крутящий момент может достигать 450 мНм, с планетарным редуктором (передаточное число может быть настроено индивидуально), низкоскоростной выходной крутящий момент (например, для точного зажима хирургических инструментов) или высокоскоростной стабильной работой (например, центрифуга).
Электронный диапазон скоростей составляет 1:1000, что позволяет переключаться между различными сценариями работы: от низкоскоростного режима с высоким крутящим моментом до высокоскоростного режима с низким крутящим моментом, адаптируясь к сложным требованиям управления.
2. Преимущества бесщеточной технологии
Технология электронной коммутации исключает искрение и электромагнитные помехи, соответствует требованиям электромагнитной совместимости медицинского класса и обеспечивает совместимость с чувствительным электронным оборудованием (например, аппаратами МРТ).
Бесщеточный двигатель поддерживает обратную связь от магнитного энкодера или датчика Холла для обеспечения замкнутого контура управления, точность позиционирования ±0,01°, подходит для автоматизированного оборудования (например, системы управления эндоскопом).
3. Оптимизация теплоотвода и регулирования температуры.
Воздушный поток на внутренней и внешней поверхностях полой чашеобразной конструкции улучшает рассеивание тепла, а благодаря использованию высокотемпературной магнитной стали и теплопроводящего корпуса повышение температуры снижается на 30% по сравнению с традиционными двигателями, что обеспечивает стабильную работу в условиях высоких температур (например, в стерилизационном оборудовании).
1. Сфера медицинского оборудования
Диагностическое оборудование: манипулятор для переноса образцов биохимического анализатора, привод вращающегося шарнира эндоскопа.
Терапевтическое оборудование: модуль прецизионного введения инсулина с помощью инсулиновой помпы, головка стоматологической бормашины, шарнирное соединение для хирургического робота (для одного робота требуется 12-20 полых чашеобразных двигателей).
Система жизнеобеспечения: привод турбины аппарата ИВЛ, микронасос пульсоксиметра.
2. Умный дом и персональный уход
Здравоохранение: вибрационный модуль для массажного пистолета с высокочастотной фиксацией, привод лезвий для электробритвы.
Умная бытовая техника: робот-пылесос, умные шторы
3. Промышленная автоматизация и роботы
Высокоточное оборудование: привод направляющих колес автоматизированных транспортных средств, микророботизированные шарниры (например, приводы пальцев человекоподобных роботов).
Оборудование для обнаружения: регулировка фокуса оптического сканера, автоматизированное управление захватом на производственной линии.
4. Новые области
Потребительская электроника: сервопривод дрона, стабилизатор подвеса, управление зумом.
Новые энергетические транспортные средства: регулировка заслонки системы кондиционирования воздуха, привод вентилятора охлаждения батареи.